隨著汽車智能化與安全性能要求的不斷提升,自適應(yīng)轉(zhuǎn)向大燈(Adaptive Front-lighting System, AFS)已成為現(xiàn)代高端車輛的標(biāo)準(zhǔn)配置之一。它能夠根據(jù)車速、轉(zhuǎn)向角度、環(huán)境光線等參數(shù),動(dòng)態(tài)調(diào)整前照燈的照射角度與范圍,顯著改善彎道及復(fù)雜路況下的照明效果,從而提升行車安全。傳統(tǒng)AFS系統(tǒng)通常依賴多個(gè)分立式傳感器、微控制器與驅(qū)動(dòng)模塊協(xié)同工作,存在系統(tǒng)復(fù)雜、成本較高、響應(yīng)延遲及可靠性挑戰(zhàn)等問(wèn)題。將核心控制與處理功能集成到單顆定制化集成電路(IC)中,成為優(yōu)化系統(tǒng)設(shè)計(jì)、實(shí)現(xiàn)高性能、高可靠性與低成本的關(guān)鍵路徑。本文旨在探討基于單芯片集成電路的自適應(yīng)轉(zhuǎn)向大燈系統(tǒng)優(yōu)化設(shè)計(jì)方案。
1. 系統(tǒng)架構(gòu)與單芯片集成優(yōu)勢(shì)
一個(gè)完整的自適應(yīng)轉(zhuǎn)向大燈系統(tǒng)主要包括:
- 傳感模塊:采集車輛狀態(tài)(如車速、方向盤轉(zhuǎn)角、車身橫擺率)與環(huán)境信息(環(huán)境光強(qiáng)度)。
- 控制處理單元:核心決策模塊,依據(jù)傳感輸入和預(yù)設(shè)算法,計(jì)算目標(biāo)燈光角度與模式。
- 驅(qū)動(dòng)與執(zhí)行機(jī)構(gòu):通常為步進(jìn)電機(jī)或伺服電機(jī),驅(qū)動(dòng)燈頭實(shí)現(xiàn)水平與垂直方向的精確轉(zhuǎn)動(dòng)。
- 通信接口:與車輛CAN(控制器局域網(wǎng)絡(luò))總線或其他車載網(wǎng)絡(luò)進(jìn)行數(shù)據(jù)交換。
單芯片集成電路設(shè)計(jì)方案旨在將控制處理單元、必要的傳感器接口、電機(jī)驅(qū)動(dòng)邏輯、通信控制器乃至部分模擬前端電路,集成到一顆專用的系統(tǒng)級(jí)芯片(SoC)或混合信號(hào)集成電路中。其主要優(yōu)勢(shì)包括:
- 高度集成與小型化:大幅減少外部元件數(shù)量,縮小PCB面積,有利于模塊的緊湊設(shè)計(jì),易于集成在有限的燈組空間內(nèi)。
- 性能優(yōu)化:芯片內(nèi)部高速互聯(lián),縮短信號(hào)路徑,降低延遲,提升實(shí)時(shí)響應(yīng)能力。專用硬件加速器(如用于坐標(biāo)變換的數(shù)學(xué)運(yùn)算單元)可進(jìn)一步提高算法執(zhí)行效率。
- 可靠性提升:減少板級(jí)連接點(diǎn),降低因振動(dòng)、溫度變化導(dǎo)致的接觸不良風(fēng)險(xiǎn)。統(tǒng)一的芯片設(shè)計(jì)與制造工藝有利于質(zhì)量控制。
- 成本效益:長(zhǎng)期來(lái)看,規(guī)模化生產(chǎn)的單芯片方案可降低物料清單(BOM)成本與組裝測(cè)試成本。
- 功耗控制:先進(jìn)的芯片制程和電源管理單元(PMU)集成,有助于實(shí)現(xiàn)更優(yōu)的能效。
2. 關(guān)鍵集成電路設(shè)計(jì)考量
設(shè)計(jì)用于AFS的單芯片IC是一項(xiàng)復(fù)雜的工程,需綜合考慮功能、性能、可靠性與車規(guī)要求。
2.1 核心處理器與算法硬件化
芯片需集成一個(gè)足夠性能的微處理器內(nèi)核(如ARM Cortex-M系列),用于運(yùn)行核心控制算法(如基于車速和轉(zhuǎn)向角度的燈光角度映射模型、自動(dòng)調(diào)平計(jì)算、故障診斷等)。為滿足實(shí)時(shí)性要求,可將計(jì)算密集型的算法模塊(如三角函數(shù)計(jì)算、濾波器)通過(guò)硬件邏輯(如FPGA模塊或?qū)S肁SIC單元)實(shí)現(xiàn),以軟件硬件協(xié)同的方式大幅提升處理速度。
2.2 混合信號(hào)接口集成
- 模擬前端:集成高精度模數(shù)轉(zhuǎn)換器(ADC),用于直接或間接連接模擬傳感器信號(hào)(如來(lái)自模擬角度傳感器或環(huán)境光傳感器的信號(hào))。
- 傳感器接口:集成數(shù)字接口(如SPI, I2C)以連接數(shù)字傳感器(如MEMS陀螺儀、數(shù)字方向盤轉(zhuǎn)角傳感器)。
- 電機(jī)驅(qū)動(dòng)接口:集成高效的PWM(脈寬調(diào)制)控制器和預(yù)驅(qū)動(dòng)電路,可直接連接外部功率MOSFET或集成小型電機(jī)驅(qū)動(dòng)能力,以控制步進(jìn)/伺服電機(jī)。
2.3 車載通信與網(wǎng)絡(luò)集成
必須集成符合汽車標(biāo)準(zhǔn)的通信控制器,如CAN FD(靈活數(shù)據(jù)速率)控制器,甚至可考慮集成以太網(wǎng)AVB等新興接口,確保與車身網(wǎng)絡(luò)穩(wěn)定、高速的數(shù)據(jù)交換。
2.4 功能安全與可靠性設(shè)計(jì)
自適應(yīng)大燈是安全相關(guān)系統(tǒng),芯片設(shè)計(jì)需遵循ISO 26262功能安全標(biāo)準(zhǔn)。這包括:
- 內(nèi)置自檢:上電自檢、運(yùn)行時(shí)周期檢測(cè),對(duì)核心邏輯、存儲(chǔ)器、時(shí)鐘進(jìn)行監(jiān)控。
- 冗余與鎖步核:對(duì)于安全關(guān)鍵的計(jì)算,可采用雙核鎖步(lock-step)設(shè)計(jì),實(shí)時(shí)比較輸出以確保無(wú)誤。
- 安全機(jī)制:集成看門狗定時(shí)器、電壓/溫度監(jiān)控、錯(cuò)誤糾正碼(ECC)存儲(chǔ)器等。
- 車規(guī)級(jí)工藝與認(rèn)證:芯片必須采用符合AEC-Q100標(biāo)準(zhǔn)的車規(guī)級(jí)工藝制造,并在設(shè)計(jì)階段考慮寬溫范圍(如-40°C至125°C)、高抗干擾性(EMC/EMI)要求。
2.5 電源管理單元
集成多路低壓差線性穩(wěn)壓器(LDO)或開(kāi)關(guān)穩(wěn)壓器,為芯片內(nèi)核、接口及外部傳感器提供穩(wěn)定、高效的電源,并支持低功耗模式(如在車輛駐車時(shí))。
3. 設(shè)計(jì)流程與挑戰(zhàn)
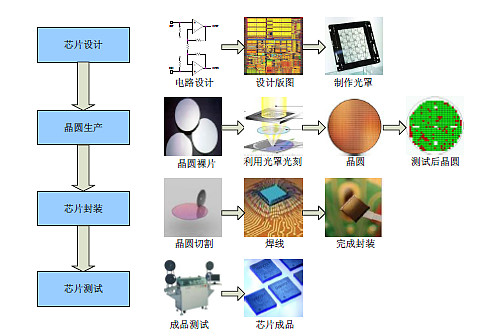
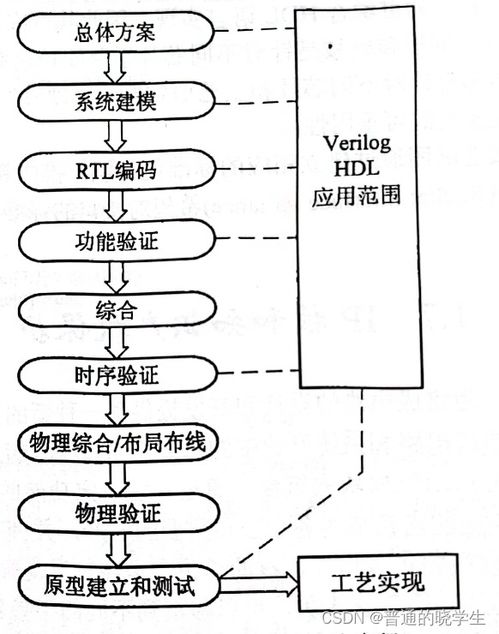
典型設(shè)計(jì)流程包括:系統(tǒng)需求定義、架構(gòu)設(shè)計(jì)、RTL(寄存器傳輸級(jí))編碼與仿真、混合信號(hào)電路設(shè)計(jì)、物理實(shí)現(xiàn)(綜合、布局布線)、流片前驗(yàn)證、以及后期的硅片測(cè)試與車規(guī)認(rèn)證。
主要挑戰(zhàn):
- 復(fù)雜度管理:混合信號(hào)SoC設(shè)計(jì)復(fù)雜度高,需要跨學(xué)科團(tuán)隊(duì)協(xié)作。
- 成本與周期:先進(jìn)制程流片成本高昂,設(shè)計(jì)驗(yàn)證周期長(zhǎng)。
- 熱管理:在密閉燈組環(huán)境中,芯片散熱需精心設(shè)計(jì)。
- 軟件協(xié)同:芯片需配套完善的驅(qū)動(dòng)程序、控制算法庫(kù)和診斷服務(wù),軟硬件協(xié)同設(shè)計(jì)至關(guān)重要。
4. 結(jié)論與展望
采用單芯片集成電路優(yōu)化自適應(yīng)轉(zhuǎn)向大燈系統(tǒng),代表了汽車電子向更高集成度、智能化與可靠性發(fā)展的重要趨勢(shì)。通過(guò)將傳感接口、核心處理、驅(qū)動(dòng)控制及通信功能深度融合,不僅能提升系統(tǒng)性能與響應(yīng)速度,還能實(shí)現(xiàn)更緊湊、更經(jīng)濟(jì)、更可靠的解決方案。隨著自動(dòng)駕駛技術(shù)的發(fā)展,AFS可能與激光雷達(dá)、攝像頭感知更深融合,這對(duì)單芯片的感知融合處理能力提出了更高要求,有望推動(dòng)集成更強(qiáng)大AI加速核的下一代車規(guī)級(jí)SoC的出現(xiàn),為智能照明乃至整車智能化提供堅(jiān)實(shí)基石。